네이버의 로봇 UX는 무엇이 특별한가? NHRI (Natural Human-robot Interaction) 가이드라인 V1
해당 글은 2022.05.16 년에 작성된 "네이버의 로봇 UX는 무엇이 특별한가? NHRI (Natural Human-robot Interaction) 가이드라인 V1을 참고하여 작성되었습니다. 네이버가 로봇을 완성해가는 과정에서 이루어진 고민과 기준에 대해 궁금증이 있으신 분들은 해당 글을 읽어보길 권장드립니다. 이번 가이드라인은 인트로를 제외하고 크게 2가지 챕터로 구성되어 있습니다.
첫번째 챕터 : 'Human-friendly Robot (사람 친화형 로봇)
- 서비스 로봇의 외형 디자인
- 사회적 규범을 지키는 로봇 주행 원칙
- 로봇 행동 디자인 방법
- 로봇의 상호작용 디자인
- 1784에서의 로봇 서비스 시나리오와 매뉴얼 등
두번째 챕터는 'Robot-friendly Building (로봇 친화형 빌딩)'
- 로봇을 위한 공간 기획
- 수직 이동을 위한 인프라와 방법론
- 로봇 사이니지 원칙
- 로봇 서비스 관리자와 협업자를 위한 작업 공간 가이드 등을 담고 있습니다

네이버랩스에는 HRI (human-robot interaction)팀이 있습니다. 이 곳에선 네이버 로봇이 사람과 자연스럽게 공존하기 위한 연구들을 수행하고 가이드라인을 채워갑니다. 흥미로운 과제가 가득합니다. 어렵기도 하고요. 당연히 있을 것 같은 기준들이 아직 없거나, 정의조차 못했던 문제들이 많기 때문입니다.
최근 HRI팀은 'NHRI'이란 이름의 가이드라인 첫번째 버전을 완성했습니다. NHRI는 natural human-robot interaction의 약자입니다. 로봇과 사람, 서비스, 공간의 조화에 대해 검증한 지식들을 묶은 것입니다. 이 가이드라인은 로봇 친화형 빌딩으로 설계된 네이버 제2사옥 '1784'에 적용되었습니다.
"이 가이드라인이 외부 공개용은 아닙니다. 네이버 내 부서간 협업을 위해 만든 거죠. 네이버의 로봇은 아주 많은 도메인 전문가들과 함께 하기 때문에, 사람이나 공간과의 조화를 위해 공통적으로 이해해야 하는 기준이 필요합니다. 로봇이란 조건을 대입하면 서로의 상식이 다릅니다. 1784 프로젝트 중 많은 부분들을 새로 규정할 수 있었습니다. 우리는 앞으로도 로봇 관련 협업을 계속할 것이기 때문에 이 가이드라인을 제작했습니다." (HRI팀 김석태)
인트로 : 네이버다운 로봇이란?
먼저 네이버의 로봇이 지향하는 가치부터 정의해야겠죠. 로봇이 사회에서 어떤 역할을 하는지, 앞으로 로봇의 가치는 어떻게 변화할 것인지, 그리고 네이버가 로봇 기술과 서비스의 발전에 어떤 방식으로 기여할 지를 탐색합니다. 이에 따라 도출된 네이버 로봇의 큰 방향성은 다음과 같습니다.
- 기능 : 사람들에게 실질적인 도움이 되면서도, 로봇이 대신했을 때 더 가치있는 기능을 우선한다.
- 형태 : 전형성에 갇히는 것이 아니라, 요구되는 기능을 바탕으로 새로운 형태를 찾는다.
- 감성 : 거부감 없이 친숙하게 상호작용할 수 있으며, 오래도록 신뢰감을 쌓을 수 있도록 한다.
위와 같은 방향성에서 도출된 '명백한 (clear)', '조화로운 (harmonious)', '믿음직한 (reliable)', '생기있는 (lively)'이라는 4가지 기본 원칙을 네이버 로봇의 행동, 외형, 화면, 서비스, 공간 등에 녹이고자 했습니다.
챕터 1 : Human-friendly Robot

이 챕터는 사람과 로봇의 상호작용에 대한 것입니다. 로봇이 실용적인 목적을 달성하면서, 동시에 사람들과 자연스럽게 어울리기 위해 필요한 요소들을 탐색합니다. 가이드라인에 담긴 내용 중 몇가지 예시를 들어볼게요.
불쾌한 골짜기(uncanny valley) 현상이란 말을 들어보셨나요? 많은 이들에게 익숙한 이론일 것입니다. 그런데 이 이론이 소개된 게 1970년대의 일입니다. 지금은 더욱 세분화되고 복잡한 조건들의 실험을 합니다.
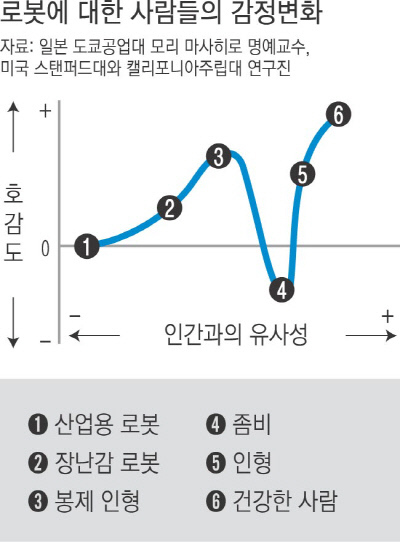
*불쾌한 골짜기란?
로봇이 인간을 어설프게 닮을수록 오히려 불쾌함이 증가한다는 일본 로봇 공학자 모리 마사히로(森政弘)의 주장이다. 프로이트의 ‘이질적인 불편함’에 가까운 심리학용어로 사용하였다. 그래프를 보면 인간과 동떨어진 모습에서는 호감도가 낮다가 유사성이 증가할수록 호감도가 늘어나지만, 부자연스러운 인간의 모습을 취하기 시작하면 호감도가 대폭 감소하는데, 이 구간(그림의 4번)의 모습이 골짜기를 닮은 것에서 유래한 단어이다.
"네이버 로봇의 외관 디자인은 복합적인 고려의 결과입니다. 미래적인 이미지가 필요하지만, SF영화의 클리셰같은 차갑고 날카로운 이미지는 지양합니다. 너무 사람처럼 보이는 외형에서 되려 위협감을 느낄 수 있고요. 기능을 예상할 수 있는 간결하면서도 안정감있는 조형이 적합합니다. 그리고 공간과의 조화도 놓치지 말아야 합니다. 우리는 1784의 로봇을 디자인하며 공간과 가장 잘 어울리는 CMF (색상, 소재, 마감)를 선택했습니다. 해당 공간에서 이질감이 느껴지지 않을 때, 사용자에게 편안하면서도 세련된 이미지를 전달하기 유리하거든요." (HRI팀 차세진)
로봇의 외관이 아닌 동작을 디자인할 때는 어떨까요? 기계다운 동작 자체는 대부분의 사람들이 충분히 수용할 수 있다는 입장을 취하지만, 그럼에도 일반적인 사회적 규범에 반하는 움직임으로 보인다면 큰 반감을 느끼게 됩니다. 로봇에게도 같은 사회 구성원으로서의 규범을 적용하려는 사람들의 본능이 작용하는 거죠.
"로봇이 아직 우리 삶에 익숙하진 않잖아요. 아직은 이동 중인 로봇에서 불편감이나 위협을 느낄 수 있어요. 이를 해소하려면 이미 형성된 사회적 규범(Social Norm)부터 파악해야 합니다. 이를 참고해 주행 원칙을 세우고, 실제 자율주행 알고리즘에 적용해야 완성이죠. 네이버랩스에선 HRI팀이 엔지니어 분들과 직접 협업하고 있기 때문에 이런 실험이 원활해요." (HRI팀 김가현)

이처럼 로봇의 외관은 외관대로, 행동은 행동대로 사람에게 복합적인 영향을 줍니다. 고려할 것들이 많죠. 상태와 상태간의 전이, 과업의 세분화, 우선 순위 등등등. 로봇 서비스가 다양해질수록 더 복잡해지고, 구현도 어려워집니다. 이런 것을 극복하기 위해 네이버랩스에서 행동 트리(Behavior Tree)를 사용해 로봇 행동을 디자인합니다.
"행동 트리(이하 BT)의 가장 큰 장점은 가독성입니다. 복잡한 로봇의 행동 로직을 평면적이고 일방향적으로 펼쳐주면, 수정과 보완이 용이해집니다. 구조적으로 전체 로직을 건드리지 않으며 부분적인 수정이 가능하고요. 협업하면서 동시에 여기저기 디버깅이 필요한 로봇 개발에 적합하죠. HRI팀에서는 BT를 직접 디자인하며 개발팀과 소통합니다." (HRI팀 조상영)
게이즈는 사람의 시선처럼, 로봇의 의도나 감정 등의 내적 상태를 드러내는 수단이 됩니다. 이 또한 사람들이 사회적으로 학습한 소통 방식을 차용하는 거죠. 먼저 우리는 로봇의 주행 의도를 표현하고자 했습니다. 게이즈란 관심과 주의가 향하는 곳이므로, 보행 중의 시선 이동은 진행 방향으로 읽힙니다. 이를 통해 다른 보행자와 자연스럽게 소통할 수 있습니다. 또한 게이즈는 기쁨이나 슬픔에 대해 적절한 수준의 표현이 가능하며, 이를 통해 사용자와의 정서적 교감을 시도할 수 있습니다. 그리고 우리는 로봇 게이즈의 기본 형태를 단순히 눈처럼 묘사하지 않았는데, 이는 다른 기하학적 도형을 결합하여 부가적인 정보를 자연스럽게 전달할 수 있도록 선택권을 넓혀주었습니다.

챕터 2 : Robot-friendly Building
이 챕터는 동시대 어디에서도 찾기 어려운 내용으로 구성되어 있습니다. 1784 정도로 거대한 로봇 친화적 공간이 전세계에 유례 없기 때문입니다. 네이버는 이미 존재하는 공간들의 제약을 벗어나, 로봇들이 활보할 미래의 건물들을 자유롭게 상상하고 가장 적합한 기준을 제시하고자 했습니다. 건물의 수명은 아주 길고, 로봇 대중화의 시간은 곧 찾아올 것이기 때문입니다
"사람과 로봇은 공간을 이해하는 능력이 달라서, 사람 입장에서는 문제가 없는 공간 요소도 로봇에게는 문제가 될 수 있습니다. 예를 들어 로봇이 시각 정보로 현재 위치를 이해하는데 있어서, 지하주차장과 같이 배경이 반복되는 장소에서는 위치를 잘못 이해하는 경우가 생깁니다. 로봇이 위치를 구분할 수 있도록 구역 번호나 그래픽 등을 적용하면 문제를 쉽게 해결할 수 있습니다. 또한 로봇은 아직 투명유리나 거울의 존재를 오인식하는 경우가 있습니다. 이런 경우 로봇 전용 필름을 설치하여 공간의 구획을 센싱할 수 있습니다." (HRI팀 신명수)
이처럼 해결 방법을 찾고 나면 간단한 일처럼 보이지만, 문제 환경과 상황을 전방위적으로 파악하는 것에만 많은 시간과 노력이 필요합니다. 아, 개중에는 잘 알려진 숙제도 있습니다. 고층 빌딩에서 로봇의 수직 이동입니다. 도시의 고층 빌딩이 존재할 수 있는 이유는 엘리베이터 때문입니다. 우리 삶의 공간을 수직으로 확장시켜 준 장치입니다. 하지만 로봇은 아직 엘리베이터를 자유롭게 이용하지 못합니다. 간혹 엘리베이터를 이용하는 로봇들을 홍보하는 곳도 있는데, 실제로는 동승하는 사람들의 불편을 초래하는 일이 생깁니다. 그래서 1784에서는 아예 새로운 시도를 했습니다. 세계 최초의 로봇 전용 엘리베이터, 로보포트(ROBOPORT)를 만들었습니다.
"프로젝트 초기에 로봇만을 위한 수직 이동 장치를 제안했어요. 로봇 서비스 물동량을 계산했을 때 엘리베이터가 병목이 될 수 밖에 없더라고요. 로보포트가 없었다면 로봇 서비스 수요를 다 감당하기 위해 인승용 엘리베이터 네다섯 대가 쉼없이 로봇을 실어 날러야 했을 거에요. 그만큼 사람들이 불편을 겪을 수 있죠. 우리는 로보포트가 도심의 로봇 서비스 대중화를 앞당길 혁신적 인프라로 보고 있습니다." (HRI팀 김석태)

물론 1784에서도 인승용 엘리베이터를 같이 활용합니다. 이때도 로봇은 대기할 때 어디에 서는 게 좋은지, 엘리베이터에 탑승하면 어디에 정차해 있는지, 그리고 엘리베이터 내에서 사람들에게 제공하면 좋을 정보 등 굉장히 디테일한 연구가 같이 이루어지고 있죠. 로봇을 위해 아예 새로운 공간 인프라를 기획하기도, 혹은 기존 공간에 로봇이 잘 적응하게도 하는 거죠.
그런데 로봇을 위한 공간에 대해서, 딱 로봇만을 고려해서는 안됩니다. 로봇과 사람이 협업하는 경우가 많기 때문입니다. 이들에 대한 배려도 굉장히 중요합니다. 물론 대체로 협업자의 경우에는 사용자보다도 로봇의 동작을 더 잘 숙지하고 있으므로, 최소한의 동작이나 이동을 통해 로봇 협업의 목표를 달성할 수 있는 공간 디자인이 필요합니다. 적은 노동으로 최대의 효율을 안전하게 올리는 것이 로봇과의 협업 이유일테니까요.
네이버가? 로봇? 왜?
네이버는 많은 B2C 서비스를 가지고 있습니다. 그리고 많은 B2B 인프라를 가지고 있습니다. R&D에도 아주 많은 도메인의 기술을 가지고 있죠. 그리고 서로 다 연결되어 있습니다. 어느 기업이나 단체에서 이렇게 다양하면서도 유기적인 포트폴리오를 갖추고 있을까요? 우리는 로봇 서비스 대중화 시대를 앞당기고 주도할 곳이 네이버라고 자신하고 있습니다. 여기에 NHRI 가이드라인이 중요한 역할을 할 것입니다. 뜻깊은 첫 버전이 완성되었고, 그렇지만 여전히 연구할 많은 과제들이 기다립니다. 업데이트되고 새롭게 써나갈 주제들과 내용들이 벌써 궁금해집니다.